Mission Robotics provides cutting-edge control and observation systems for Remotely Operated Vehicles (ROVs). The above system is easily compatible with existing BlueROV2 and similar systems, taking an affordable marine ROV system to the next level with superior camera performance, time-synchronized video and telemetry data feeds, operational efficiency for fast and reliable deployment, future-proof hardware, and topside client software for customization and expansion.
Mission Robotics can turn a BlueROV2 system into a state-of-the-art professional marine ROV for marine exploration, reef preservation, infrastructure inspection, and more. Our engineers can customize the system to fit new designs for custom applications. The sky is the limit.
https://youtu.be/iCN_aX2DFMY
Superior Camera Performance
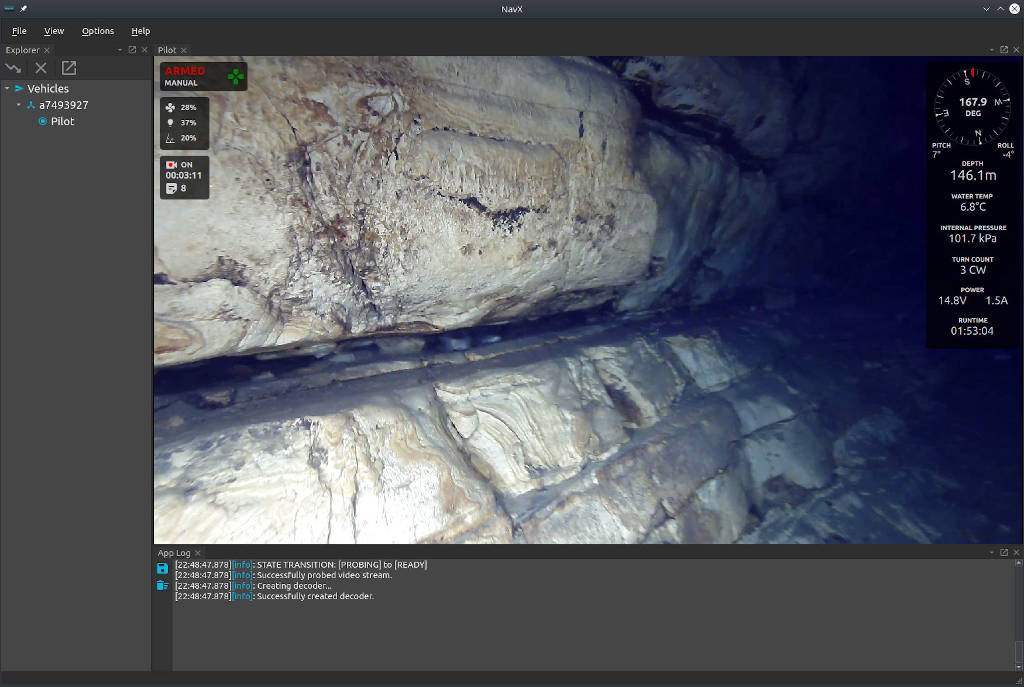
Our highly-optimized video pipeline aims to provide the most crisp and responsive piloting experience possible, rivaling the latency of traditional analog cameras and providing the best image quality on the market in its price class.
The entire optical path has been designed and tuned for excellent low-light performance, providing an out-of-the-box experience that will allow you to see further and more clearly than ever before in some of the most challenging environments.
Up to 60 frames per second 1080p video (H.264, MJPEG).
Extreme low-light sensitivity (4x better light sensitivity compared to the BlueROV Low Light HD USB Camera).
Glass-to-glass latency less than 130 ms at full resolution (1080p60).*
Hardware acceleration used for video decoding and rendering in topside application.
Video processing offloaded from CPU to GPU, allowing higher framerates and multiple simultaneous streams.
Current support for Intel integrated graphics, with software decoding fallback.
Roadmap includes support for NVIDIA® and AMD discrete graphics cards.
Lens, sensor, and image signal processor (ISP) combination designed and optimized for underwater video.
*As tested on a Dell XPS 13 9300 running Ubuntu 20.04 with an H.264 stream. Latency is average latency. Learn how we measure video latency.
Time-Synchronized Video and Telemetry Data Recording
All data streams (video, vehicle telemetry, and user-added sensors/devices) are time-synchronized and recorded together, allowing for simple post-processing and analysis.
Video is recorded as an MP4 file and telemetry is stored as a CSV file.
MP4 files allow for immediate import into video editing tools such as Adobe Premiere Pro.
Our freely accessible Python example code provides an immediate path to post-processing dive recordings with ease.
Mark important events with the press of a button during your dive, making them easy to find and review later.
Pilot audio from the topside device can be recorded, providing additional context for your mission.
Because the cost of field operations is typically significantly more than the cost of hardware, our products are designed to be reliable and robust, reducing downtime and allowing you to focus on your mission, rather than worrying about the tools used to accomplish it.
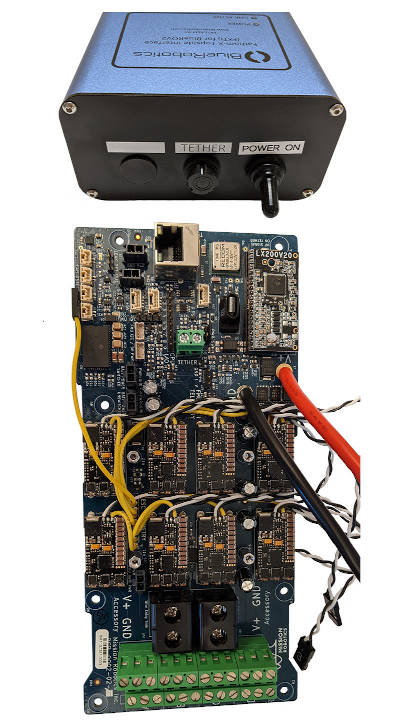
Remote vehicle power switch is integrated into the topside.
Sends a power on/off signal over the existing single twisted-pair of wire which carries your data.
Allows turning the vehicle on/off without having to connect/remove the battery, while still using your existing tether.
Power switching is “soft”, allowing for vehicle data cleanup upon power-down, eliminating potential data corruption.
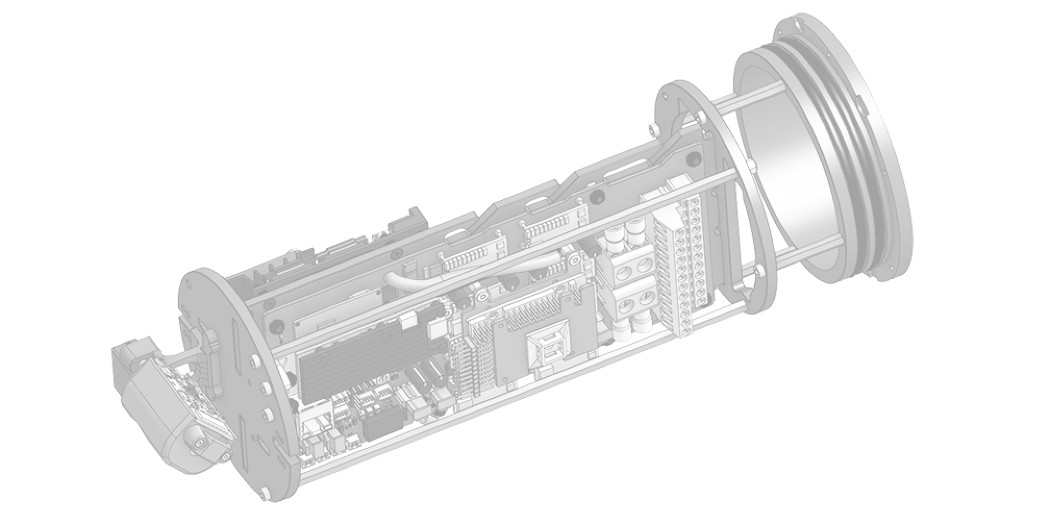
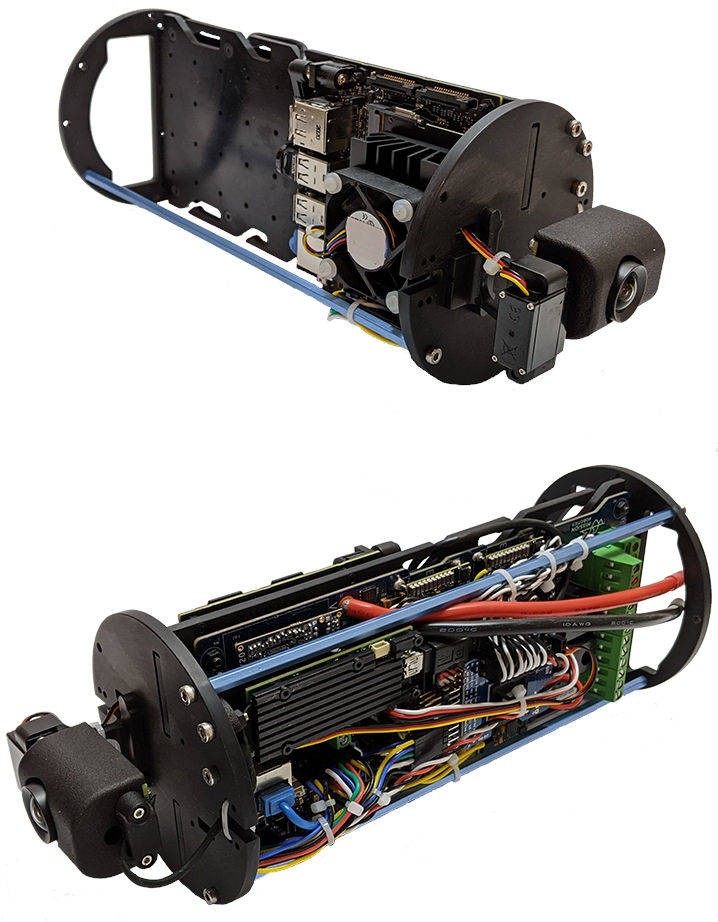
Vehicle electronics are consolidated onto a single PCB, improving reliability and eliminating wasted space in the 4 inch tube.
Over-the-air (OTA) updates with robust integrity checks to ensure the vehicle always remains in a usable state.
DHCP address assignment and dynamic vehicle/device discovery allows for out-of-the-box operation across one or more vehicles and devices; no more setting static IP addresses.
Vehicle telemetry includes leak detection, multiple current and voltage readings, internal pressure, multiple temperature points, and CPU resource usage.
ESC telemetry feedback allows for analysis of individual motor performance. Telemetry parameters include motor RPM, current draw, voltage, and ESC temperature.
Subsystem power switching for load shedding and subsystem recovery.
Designed for Customization and Expansion
Because marine applications often differ significantly in their goals and requirements, we built a system where a user with basic programming skills can easily add sensors and actuators onto the vehicle to meet their exact requirements.
System is interface compatible with existing Blue Robotics accessories and we are continuously adding device support for third party sensors.
Utilizing provided example sketches and libraries, a user can add custom sensors and actuators to the vehicle using Arduino boards or other microcontrollers. Our software creates a bi-directional communication link between these user-added devices and the topside computer, allowing you to monitor, record, and control the devices in real time. This allows for benchtop development of the payload which can then be easily integrated into the vehicle through a single USB connection.
Full vehicle Application Programming Interface (API) via Data Distribution Service (DDS) middleware.
Reduced electronics footprint leaves more than a quarter of the tube available for user accessories.
Multiple power connection points and a variety of I/O for user expansion.
Advanced developer tools (licensed separately) coming in the future to include:
SDK to simplify and accelerate development of user applications.
Ability for user-added custom processing steps in the camera pipeline.
Remote vehicle connectivity and monitoring for fleet management.
Docker-based development and deployment environment with CI/CD pipelines.
Example applications for both frontend and vehicle development.
Ever-Evolving Platform
As vehicle and sensor technology is constantly becoming more advanced, the system hardware was designed with future-proofing in mind. The main processor is a NVIDIA® Jetson Nano™, which has substantially more processing power than a Raspberry Pi* and features higher-bandwidth interfaces like USB 3.0 and Gigabit Ethernet. The flight management unit (FMU) uses a significantly faster processor and newer generation sensors (gyro, accelerometer, magnetometer) than the 3DR Pixhawk® 1*.
By moving to these newer processors, we have significantly expanded I/O and processing capabilities, enabling advanced use cases:
NVIDIA® series of system on modules (SOMs) allow for cutting-edge machine learning and computer vision applications.
Support for multiple cameras with virtually zero additional latency.
Integration of high-bandwidth peripherals.
*The BlueROV2 uses a Raspberry Pi 3B and a Pixhawk® 1.
Roadmap
We are continuously improving the system with new features to make the product better and operations more efficient. Our development roadmap is flexible and our customer needs drive what features we build next. Our current roadmap includes the following features:
Onboard Vehicle Recording: Decouple camera and sensor recording bandwidth requirements from existing tether bandwidth limitations, since data can be downsampled for the live pilot view. Our hardware already has a 256GB internal drive to support this feature.
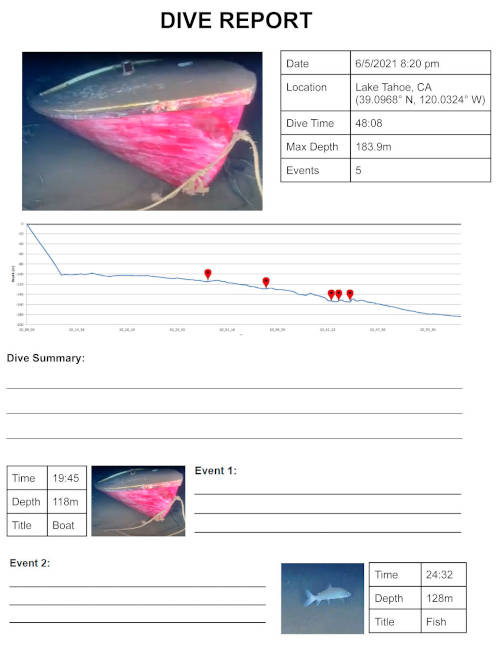
Automated Report Generation: Shorten the time from dive to decision making by getting critical data to stakeholders quickly and painlessly.
ROS2: Build your own applications leveraging the tools in the ROS2 ecosystem such as Gazebo and RViz.
Open Beta: We have completed a closed beta of this product and are entering into an open beta. Do you want to be an early adopter of this groundbreaking technology? Contact us to learn more.
Integrators and Distributors: Not exactly the form factor or functions you need for your application? Contact us to learn how we can customize it for your needs.
Manage Cookie Consent
To provide the best experiences, we use technologies like cookies to store and/or access device information. Consenting to these technologies will allow us to process data such as browsing behavior or unique IDs on this site. Not consenting or withdrawing consent, may adversely affect certain features and functions.
Functional
Always active
The technical storage or access is strictly necessary for the legitimate purpose of enabling the use of a specific service explicitly requested by the subscriber or user, or for the sole purpose of carrying out the transmission of a communication over an electronic communications network.
Preferences
The technical storage or access is necessary for the legitimate purpose of storing preferences that are not requested by the subscriber or user.
Statistics
The technical storage or access that is used exclusively for statistical purposes.The technical storage or access that is used exclusively for anonymous statistical purposes. Without a subpoena, voluntary compliance on the part of your Internet Service Provider, or additional records from a third party, information stored or retrieved for this purpose alone cannot usually be used to identify you.
Marketing
The technical storage or access is required to create user profiles to send advertising, or to track the user on a website or across several websites for similar marketing purposes.